Algunos libros editados:
- Robotics and Automation in the Maritime Industries. Edited by: J. Aranda, P. Gonzalez de Santos, J.M. de la Cruz. ISBN-13: 978-84-611-3915-6. ISBN-10: 84-611-3915-1. (descargar)
- Automation for the Maritime Industries. Edited by J. Aranda, MA Armada, JM de la Cruz. CSIC. 2004. ISBN: 84-609-3315-6. (descargar)
Últimas publicaciones del grupo (desde 2018).
Publicaciones recogidas en repositorios de la UNED:
- En los webs de los proyectos, en el servidor de proyectos CTB.
- En el servidor de publicaciones del Departamento.
- En los curriculums de los investigadores.
- En los registros de la OTRI.
- En los repositorios institucionales de la UNED.
Los resultados de la investigación han sido objeto de interés en diversos sectores industriales. Este interés se ha visto reflejado en la participación de diferentes empresas e instituciones como EPOs en los proyectos de investigación, en proyectos de transferencia a dichas empresas finaciados en convocatorias públicas competitivas, contratos y convenios.
En este sentido, desde su inicio como grupo en 1997, los colaboradores y miembros del grupo de investigación GI3 han trabajado y colaborado en proyectos, contratos, convenios, etc., entre otros, con:
La investigación ha conducido al desdarollo de la Pantente Nacional ES2939782 “Sistema y procedimiento para el atraque y desatraque automático de un vehículo autónomo de superficie o submarino” con extensión internacional WO2023073258A1:
- Curso 2020-21: Sistema autónomo para la contención de vertidos en el agua: Evaluación de su madurez tecnológica.
Arrastre de una barrera por un barco autónomo. Prueba en pantano.
Ensayos en pantano de un vehículo arrastrando una barrera de forma autónoma.
Coordinación de vehículos autónomos de superficie. Prueba en pantano.
Ensayos en pantano de dos USVs coordiandos en una actuación de colaboración para rescate. Los vehículos corresponden a dos modelos a escala de 6 y 5 metros de eslora respectivamente.
Seguimiento de trayectoria de USV. Vídeos de pruebas realizadas en pantano.
Vehículo autónomo de superficie de 1 m de eslora, con implementación de los algoritmos para el seguimiento de trayectoria.
Posicionamiento en un punto de un hovercraft a escala. Vídeos de pruebas realizadas en laboratorio.
Hovercraft para ensayos en laboratorio, con implementación de los algoritmos para posicionarse en un punto fijado desde estación de base. El posicionamiento del vehículo se hace mediatne visión con una cámara situada acimutalmente. El control se implmenta en la estación base.
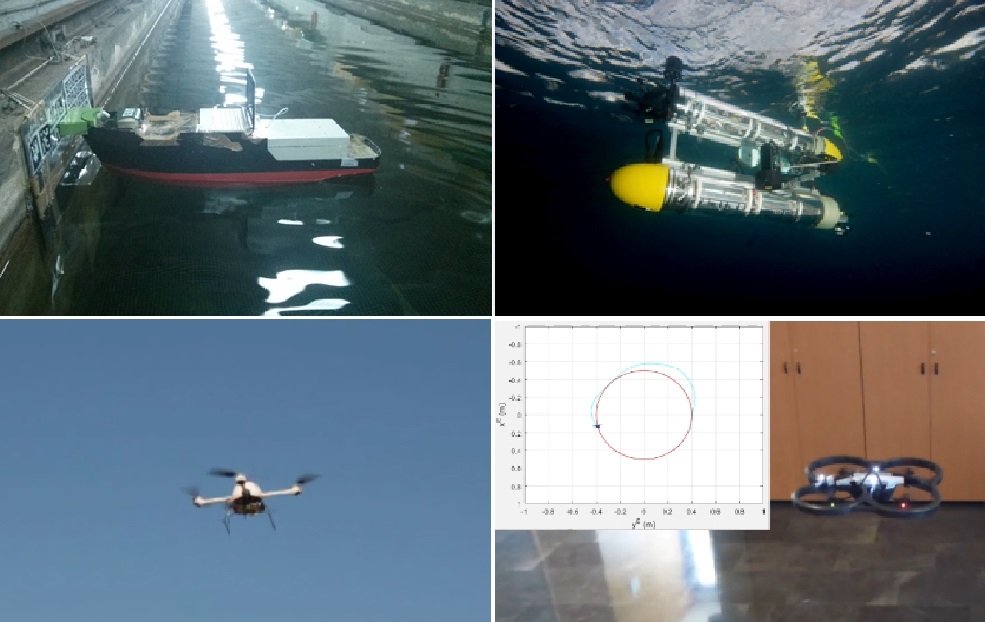
Guiado y control de vehículo autónomo de superficie. Vídeos de pruebas realizadas en el CEHIPAR.
USV basado en un modelo a escala de un ferry rápido, con implemntación para el guiado y control. Se implementa algoritmos para actuaciones autónomas.
Estabilización de buque rápido. Ejemplo para velocidad de 40 nudos (pruebas en el CEHIPAR).
Modelo a escala de ferry rápido con implentación de un control de estabilización de pantocazos. El objetivo es disminuir los movimeintos verticales, y reducir el índice de mareo en el caso de barcos con tripulación.
Control de cuadrirotor (drone). Estabilización en un punto.
Test de estabilziación en un punto de un cuadrirotor en un entorno de laboratorio.
Programas emitidos en TVE2 (recogidos en el Repositorio de contenidos digitales de la UNED):
- Tecnología para la seguridad marítima.
- Automática marítima. Nuevos retos de investigación.
- Tecnología para la seguridad marítima (versión 2)
Programas emitidos en Radio 3 de RNE(recogidos en el Repositorio de contenidos digitales de la UNED):
- Tendencias de la Informática Industrial. Qué es la minera de datos y para qué sirve?.
- Tendencias de la Informática Industrial. Los robots móviles, estado actual y perspectivas de futuro.
- Tendencias de la Informática Industrial. Aviones no tripulados: aplicaciones, sistemas de control y software.
- Ojos artificiales en agricultura.
- Tendencias de la Informática Industrial. El mundo de la informática y la automática.
- Tendencias de la Informática Industrial. Automática y Sistemas en el sector marítimo.
- Tendencias de la Informática Industrial. Los robots móviles, estado actual y perspectivas de futuro.
- Tendencias de la Informática Industrial. Energía de fusión: un reto tecnológico.
- Tendencias de la Informática Industrial. Simulación y simuladores en la industria.
- Tecnología para la seguridad marítima.
- GPUs: tarjetas gráficas para cálculo.
- Certificados digitales.
- Ciberseguridad en la industria.
- Energía de Fusión y el proyecto ITER.
- Ciberseguridad en sistemas de control industrial ICS/SCADA.
- Dispositivos móviles.
Interactive Tool for Time Series Analysis Education (ITTSAE) .
ITTSAE (Interactive Tool for Time Series Analysis Education) is a free of charge software tool for the teaching and learning of the basic concepts of time series analysis in the time domain and the main features of basic stochastic processes: white noise, autoregressive (AR), moving average (MA), autoregressive moving average (ARMA), autoregressive integrated moving average (ARIMA). (web)
Interactive Tool for Time Series Analysis Education - Time Series Generator (ITTSAE-TSG).
ITTSAE-TSG (Interactive Tool for Time Series Analysis Education - Time Series Generator) is a free of charge software tool for generating of time series which are realizations of basic stochastic processes: white noise, autoregressive (AR), moving average (MA), autoregressive moving average (ARMA), autoregressive integrated moving average (ARIMA). (web)
Interactive Tool for Time Series Analysis Education - Time Series Analyser (ITTSAE-TSA).
ITTSAE-TSA (Interactive Tool for Time Series Analysis Education - Time Series Analyser) is a free of charge software tool for analysing in the time domain time series which are realizations of basic stochastic processes: white noise, autoregressive (AR), moving average (MA), autoregressive moving average (ARMA), autoregressive integrated moving average (ARIMA). (web)
SISO-QFTIT : Herramienta interactiva para el diseño de controladores robustos mediante QFT.
SISO-QFTIT es una herramienta software para el diseño de controladores robustos mediante el uso de la metodología QFT. Esta herramienta ha sido desarrollada en SYSQUAKE por Jose Manuel Díaz, Sebastián Dormido y Joaquin Aranda , profesores del Departamento de Informática y Automática de la UNED . (web)
TIG : Generación Interactiva de Plantillas.
Template Interactive Generator (TIG) es una herramienta software que permite calcular los contornos de las plantillas de aquellas plantas cuyas funciones de transferencia poseen incertidumbre paramétrica de tipo afín en sus coeficientes . (web)
DEVS/SOA : Plataforma DEVS de simulación distribuida.
This web oriented framework is to connect heterogeneous DEVS simulation elements in a transparent, open, and scalable way. (web)
SHAGAC: Sistema Hipermedia Adaptativo para la Generación Automática de Cursos .
El sistema desarrollado, al igual que los sistemas hipermedia adaptativos, utiliza una red semántica en forma de grafo donde se estructura toda la información sobre un área determinada. A partir de ella es capaz de generar cursos listos para ser utilizados por el usuario o alumno . (web)